汽車雷達線路板廠講汽車雷達是用于汽車或其他地面機動車輛的雷達,它包括基于不同技術(比如激光、超聲波、微波)的各種不同雷達,有著不同的功能(比如發現障礙物、預測碰撞、自適應巡航控制),以及運用不同的工作原理(比如脈沖雷達、FMCW雷達、微波沖擊雷達)。
他們各自都有自己的特點,比如攝像頭的優點就很突出:精度高,距離遠,直觀方便;可是缺點也同樣突出:受到天氣的影響太大。倘若遇到霧霾,或是陰雨綿綿,檢測效果會大大受影響。
1
超聲波雷達
超聲波雷達是通過超聲波發射裝置向外發出超聲波,再利用接收器接收反射回來的超聲波時間差來測算距離。
超聲波雷達容易受天氣情況影響,不同天氣的傳播速度不同,車速較快時誤差較大,另外就是超聲波散射角度大,不利于較遠距離的回收信號傳播;但其也有成本低、穿透性強、防水、防塵等優勢。
車身前后保險杠上看到的圓形裝置即超聲波雷達,其傳播速度慢,所以車輛運動較慢或者靜止時,它能發揮作用,一旦車速過高,效果會大打折扣。于是,在車輛高速運動時更適用反應更快的毫米波雷達。
2
毫米波雷達
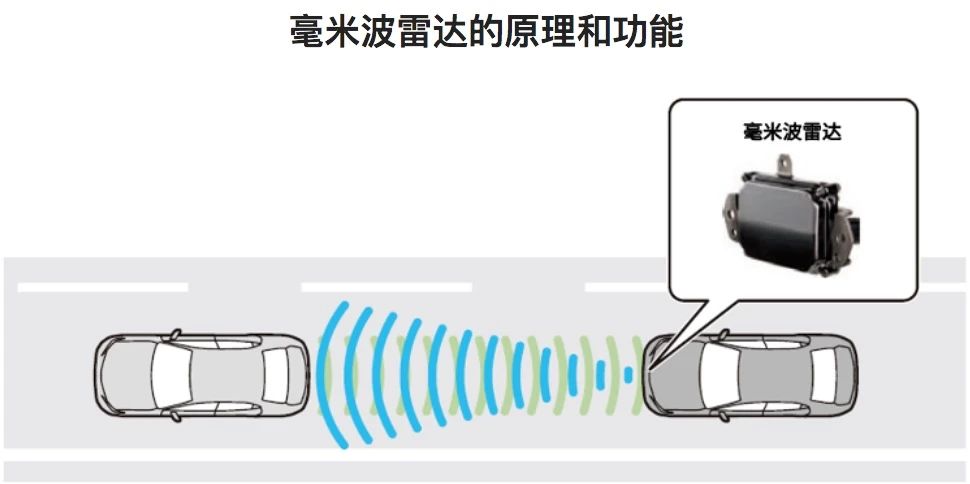
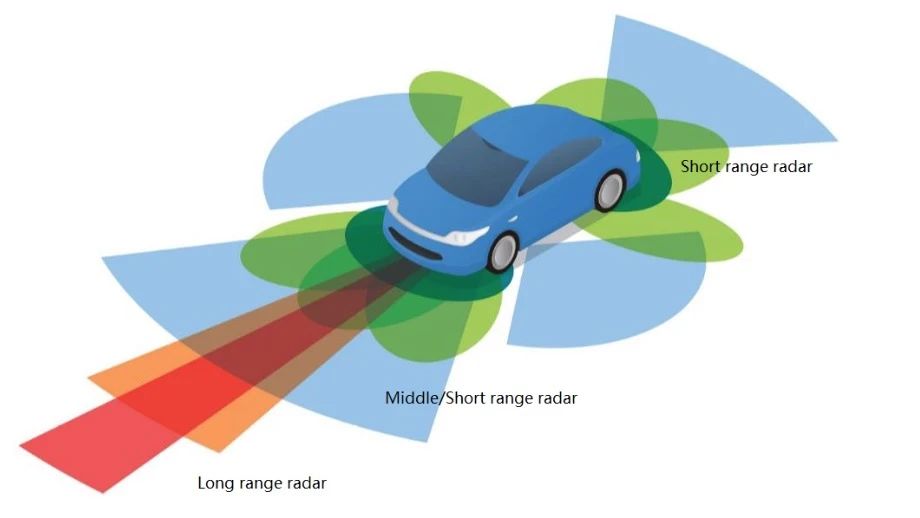
毫米波雷達,是工作在毫米波波段探測的雷達。測距原理是把無線電波(雷達波/電磁波)發射出去,根據接收回波與發送之間的時間差測得目標位置距離數據。與紅外、激光、電視等光學導引頭相比,毫米波導引頭穿透霧、煙、灰塵的能力強,具有全天候(大雨天除外)全天時的特點,毫米波導引頭的抗干擾、反隱身能力也優于其他微波導引頭 。
軟硬結合板廠講但毫米波雷達在雨、霧和濕雪等高潮濕環境的衰減,以及大功率器件和插損的影響會降低毫米波雷達的探測距離;樹叢穿透能力差,相比微波,對密樹叢穿透力低;元器件成本高,加工精度相對要求高,單片收發集成電路的開發相對遲緩,需要與攝像頭互補使用。
3
激光雷達
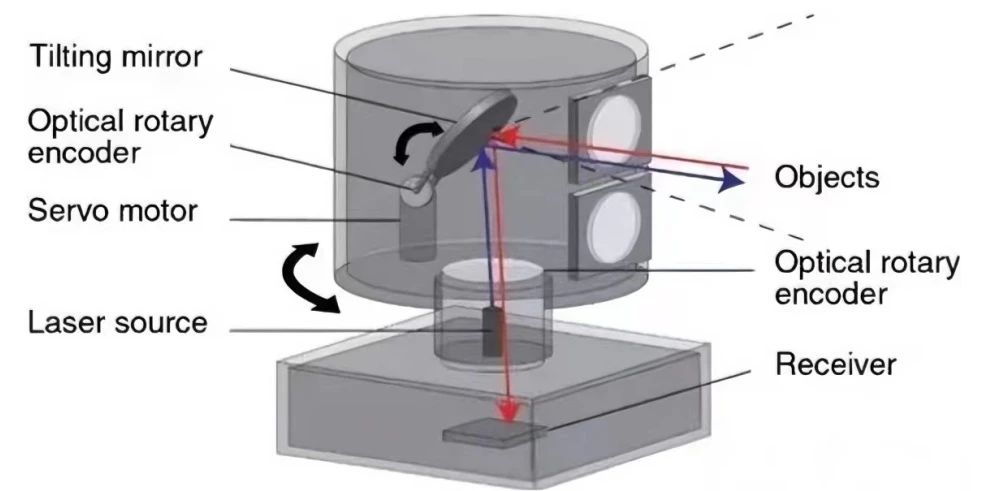
激光雷達是以發射激光束探測目標的位置、速度等特征量的雷達系統,激光雷達也稱光學雷達。它由激光發射機、光學接收機、轉臺和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。
因為各種物體的反射角度不同,所以連車道線和路面也都可以區分開來,只有那些被遮擋的物體光束是無法探測;由于光速是我們目前已知的最快速度,因此激光雷達也是所有雷達中傳播速度最快的。
激光雷達目前存在挑戰為,車規級產品難度高,成本高,壽命短。在5年前,64線激光雷達的價格高達10萬美元(約人民幣70萬元),如今由于國內很多激光雷達科技公司都力爭通過技術進步,使激光雷達的成本大幅下降,短期內64線雷達價格有望降到200美元(約合人民幣1300元)。
4
攝像頭
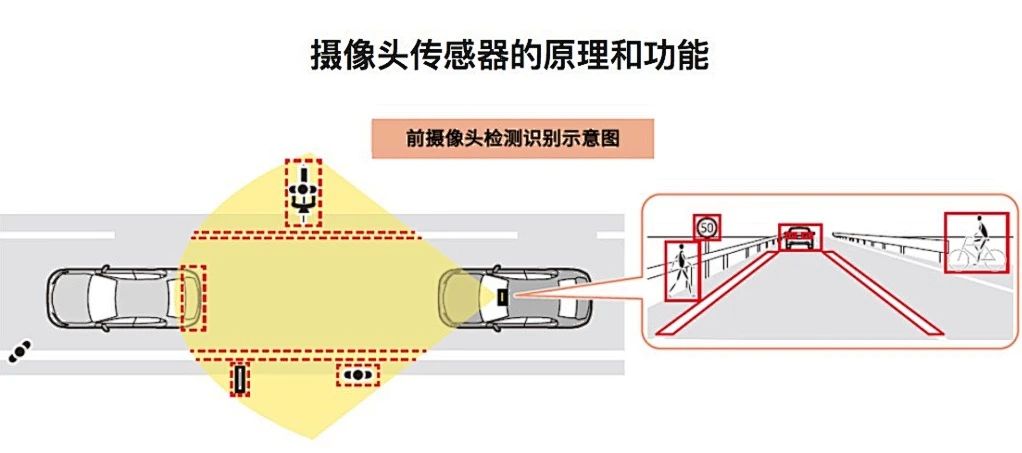
攝像頭傳感器,顧名思義就是通過攝像頭拍攝車輛周邊場景,并以此來識別車輛、行人、行車線等的傳感器。從拍攝到的影像可以檢測出車輛及車燈、行車道的白線及標識、行人及自行車等。車載攝像頭是ADAS系統的主要視覺傳感器,借由鏡頭采集圖像后,有攝像頭內的感光組件電路及控制組件對圖像進行處理并轉化為電腦能處理的數字信號,從而實現感知車輛周邊的路況情況,實現前向碰撞預警,車道偏移報警和行人檢測等ADAS功能。
電路板廠講車載攝像頭的大致原理如下:
a. 圖像處理,將圖片轉換為二維數據;
b. 模式識別,通過圖像匹配進行識別,如車輛、行人、車道線、交通標志等;
c. 利用物體的運動模式,或雙目定位,估算目標物體與本車的相對距離和相對速度。
 通訊手機HDI
通訊手機HDI 通訊手機HDI
通訊手機HDI 通訊模塊HDI
通訊模塊HDI 5G模塊PCB
5G模塊PCB