汽車雷達線路板廠了解到,自動駕駛系統(tǒng)中毫米波雷達是常見的傳感器配置之一,由于其具有穿透力強(不受煙、霧、灰塵影響)、可全天候使用、性能穩(wěn)定等特點。因此毫米波雷達成為彌補激光、攝像頭等其他傳感器在車載應用中所不具備的使用場景。
出于此,來梳理一下毫米波雷達的資料。
01.
毫米波雷達原理
毫米波雷達本質(zhì)是利用電磁波信號被其發(fā)射路徑上的物體阻擋繼而會發(fā)生反射。通過捕捉反射信號,來確定物體的距離、速度和角度。其波長范圍為1~10mm,頻率范圍為30~300GHz。

但是由于雷達頻率受各國政府嚴格管控,因此車載毫米波雷達的應用頻段主要集中在24G、60G、77G、79GHz這幾個頻率的應用。
02.
毫米波雷達分類
按工作方式來看,毫米波雷達分為脈沖類型和連續(xù)波類型,連續(xù)波類型又細分為CW(恒頻連續(xù)波,只能測速不能測距)、FSK(頻移鍵控連續(xù)波、可探測單個目標的具體和速度)、FMCW(調(diào)頻連續(xù)波,可對多個目標實現(xiàn)測距和測速,分辨率高,技術(shù)成熟)。
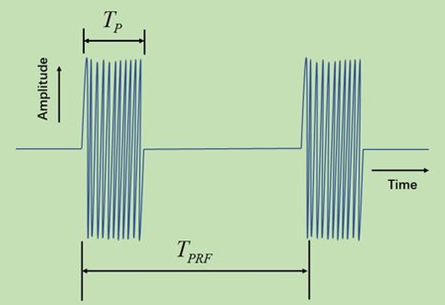
脈沖雷達工作原理:脈沖工作方式可以將發(fā)射波和回波區(qū)分出來,同時可對比接收回波與發(fā)射信號中不同頻率,利用多普勒效應得到目標的速度信息。也可以利用回波的時間信息得到距離信息。該方式數(shù)據(jù)處理原理較簡單,但由于單次脈沖需求功率大,存在間歇期的盲區(qū),在當前毫米波雷達產(chǎn)品中未被采用。
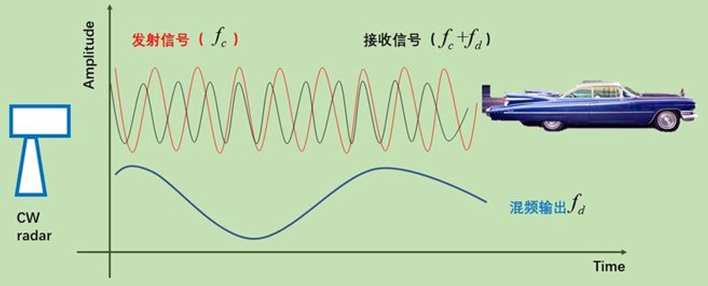
CW恒頻連續(xù)波雷達工作原理:對接收信號與發(fā)射信號的混頻可以得到目標的多普勒頻率進而得到速度信息。但是由于是連續(xù)波,不能測得發(fā)射信號的來回時間。因此CW雷達不能進行距離測量,只能實現(xiàn)對目標的速度測量。
FMCW雷達工作原理:FMCW雷達的發(fā)射頻率隨時間變化呈線性變化,這樣在發(fā)射信號里面可攜帶時間信息。高頻信號由壓控振蕩器產(chǎn)生,通過功率分配器將一部分經(jīng)過額外放大后饋送至發(fā)射天線,另一部分耦合至混頻器,與接收的回波混頻后低通濾波,得到基帶差頻信號,經(jīng)過模數(shù)轉(zhuǎn)換后送至信號處理器處理。這樣得到的信號既能得到時間信息,也可以得到多普勒效應特征點。因此可同時測量速度和距離信息。
03.
毫米波雷達的數(shù)據(jù)傳輸
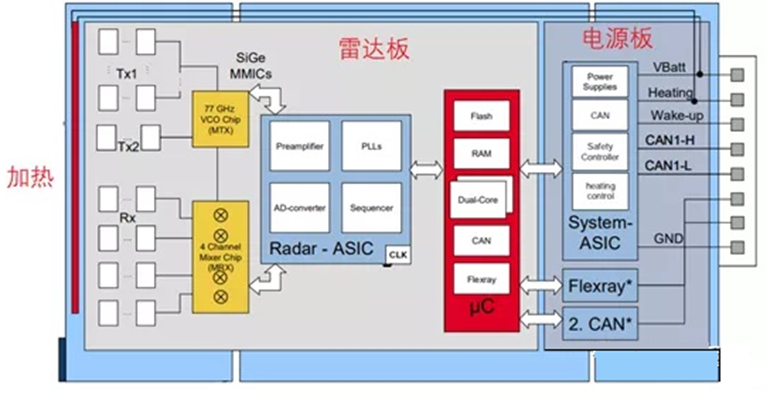
雷達芯片自帶數(shù)據(jù)處理能力,其一般有兩種信號傳遞方式:
1.雷達直接給出提供32個原始目標,并且告知是靜止還是運動目標。在這種模式下,需要主機廠自行結(jié)合視覺算法,來判斷靜止物體是汽車還是其他障礙物。
2.雷達控制器基于毫米波的RCS反射面積和不同幀之間反射點情況,從32個原始目標中篩選出功能安全目標——即車輛需要做出反應的目標。
因此在這兩種模式下傳遞的信號其實已經(jīng)屬于低數(shù)據(jù)量的特征點,故雷達與控制器之間的數(shù)據(jù)傳輸采用傳統(tǒng)的CAN通訊。
04.
毫米波雷達的優(yōu)缺點
軟硬結(jié)合板廠開頭的時候就大致描述了毫米波雷達的具有的優(yōu)質(zhì)特性,但是缺點也難以避免,比如毫米波雷達無法提供高度信息,空間分辨率一般,并且嚴重的是,由于毫米波雷達的工作方式是利用多普勒效應來檢測目標的,這就會導致對于靜態(tài)目標產(chǎn)生漏檢的情況,導致自動駕駛系統(tǒng)做出錯誤的決策。
另外由于毫米波雷達芯片基本被博世、NXP、TI壟斷,其中博世和NXP又不對外供貨,導致國內(nèi)企業(yè)基本用的是TI的芯片,這也導致同質(zhì)化競爭特別嚴重,另外在PCB基材以及結(jié)構(gòu)布局對雷達性能很敏感,基本上這一塊也受國外企業(yè)壟斷,比如羅杰斯等。
05.
毫米波雷達的發(fā)展方向
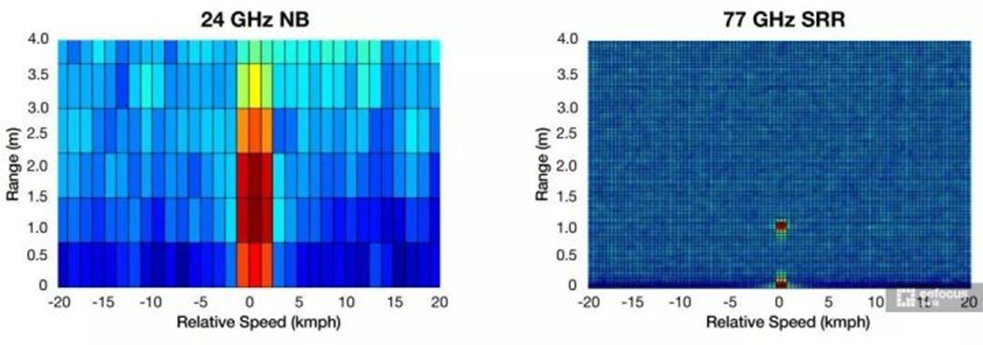
1.前向MRR和LRR往高頻率77/79GHz方向演化。
2.毫米波雷達對方位的探測,利用的是波長短的特性,使用陣列天線來構(gòu)成窄波束。實現(xiàn)一個雷達覆蓋較寬的方位角。
3.提高雷達頻率,在保持相同增益的條件下,天線孔徑可隨波長的平方倍數(shù)減少。對應雷達尺寸也可降低。
4.同時孔徑減小可提供更窄的波束,雷達的速度,位移,物體尺寸的探測精度可大幅度提高。
以上就是PCB廠整理的車載毫米波雷達相關(guān)知識!
 通訊手機HDI
通訊手機HDI 通訊手機HDI
通訊手機HDI 通訊模塊HDI
通訊模塊HDI 5G模塊PCB
5G模塊PCB